Как робот Минотавр научился самостоятельно ходить за несколько часов (видео)
Благодаря достижениям программирования робот выучился ходить без участия людей

Передвижение в пространстве — одна из самых сложных задач для всех живых существ . Особенно поначалу. Человеку, чтобы впервые встать на ноги, и тем более сделать первый шаг, требуется до полутора лет после рождения.
А роботу по имени Минотавр, чтобы научиться перемещаться по небольшому участку лаборатории, понадобилось порядка 6 часов. Для этого робототехники, связанные с Google Robotics , применили особый тип самообучающей программы. Робот постигает технику ходьбы на четырех ногах по нарастающей: от робких и неуклюжих попыток ползанья до уверенной «походки» с безошибочной ориентацией в пространстве.
Для этой работы программисты применили методику, известную как обучение с подкреплением. Впервые данный метод был заявлен в начале 1960-х советским ученым Михаилом Цетлиным. Согласно ему, система-ученик, называемая агентом, помещается в определенную среду. Агент и среда взаимодействуют друг с другом, раз от раза все глубже постигая себя и свое окружение. Среда реагирует на агента, поощряя или наказывая его. Чем больше система-ученик получит поощрений и чем скорее сократит до минимума наказания, тем более эффективным окажется результат.
Другими словами, программисты Минотавра решили обойтись без того, чтобы жестко запрограммировать каждый шаг и движение своего робота. Сложность в том, что невозможно предугадать каждый шаг и воздействие на робота внешней среды.

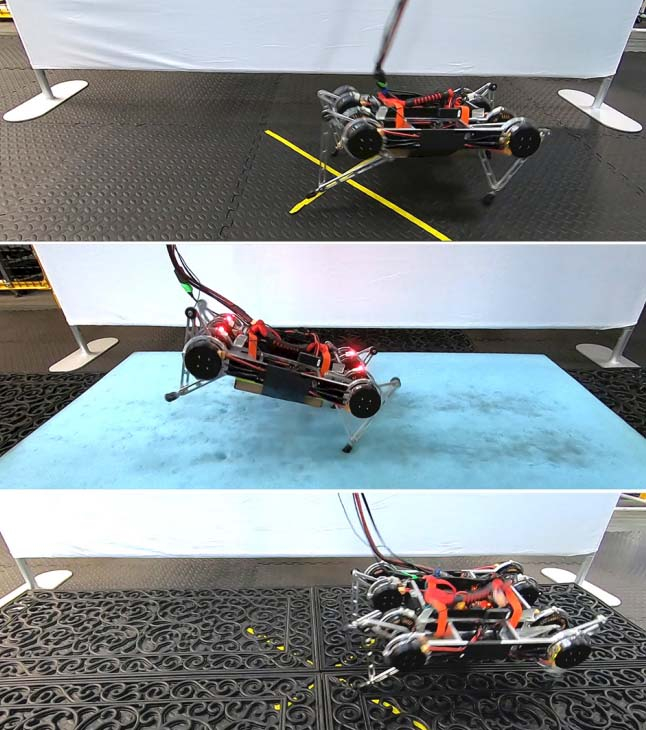
Метод обучения с подкреплением использует программное обеспечение для сбора дополнительной информации о своем окружении через постоянно повторяющиеся испытания и награждение успешных попыток. Минотавр был помещен в условия физической среды, состоящей из нескольких типов поверхностей: плоской, мягко-упругой и рельефной. Для первой использовался гладкий пол в лаборатории (на фото вверху), для второй он покрывался матрасом (в центре), для третьего вместо матраса использовался коврик с геометрическими фигурами (внизу).
По словам одного из участников проекта, Сехуна Ха, сотрудника Технологического института Джорджии, они «во-первых, разработали многозадачную обучающую систему, предотвращающую выход робота из зоны обучения. Во-вторых, минимизировали число отказов в реальной системе без дополнительной настройки. В-третьих, создали аппаратную инфраструктуру и стоячий контроллер: он обеспечивал непрерывный сбор данных. Этим экспериментом мы показываем, что развитие автономной системы обучения достаточно для решения сложных задач локомоции».
Посмотрите видео: всего несколько часов — и робот пошел. Для сравнения: в 2018 году их первый проект, робот Ха, потребовал участия обучающей команды специалистов и 100 ручных сбросов.

В чем перспективность показанной работы? Уход от трудоемкого программирования и применение более совершенных методик может привести к разработке и внедрению шагающих роботов, незаменимых для поисково-спасательных или военных миссий.
Видео: YouTube-канал «Sehoon Ha»
фото: YouTube-канал «Sehoon Ha»









![Роботизированный парковочный консьерж [видео]](/uploads/posts/2014-07/1404414301_ray.jpg)








